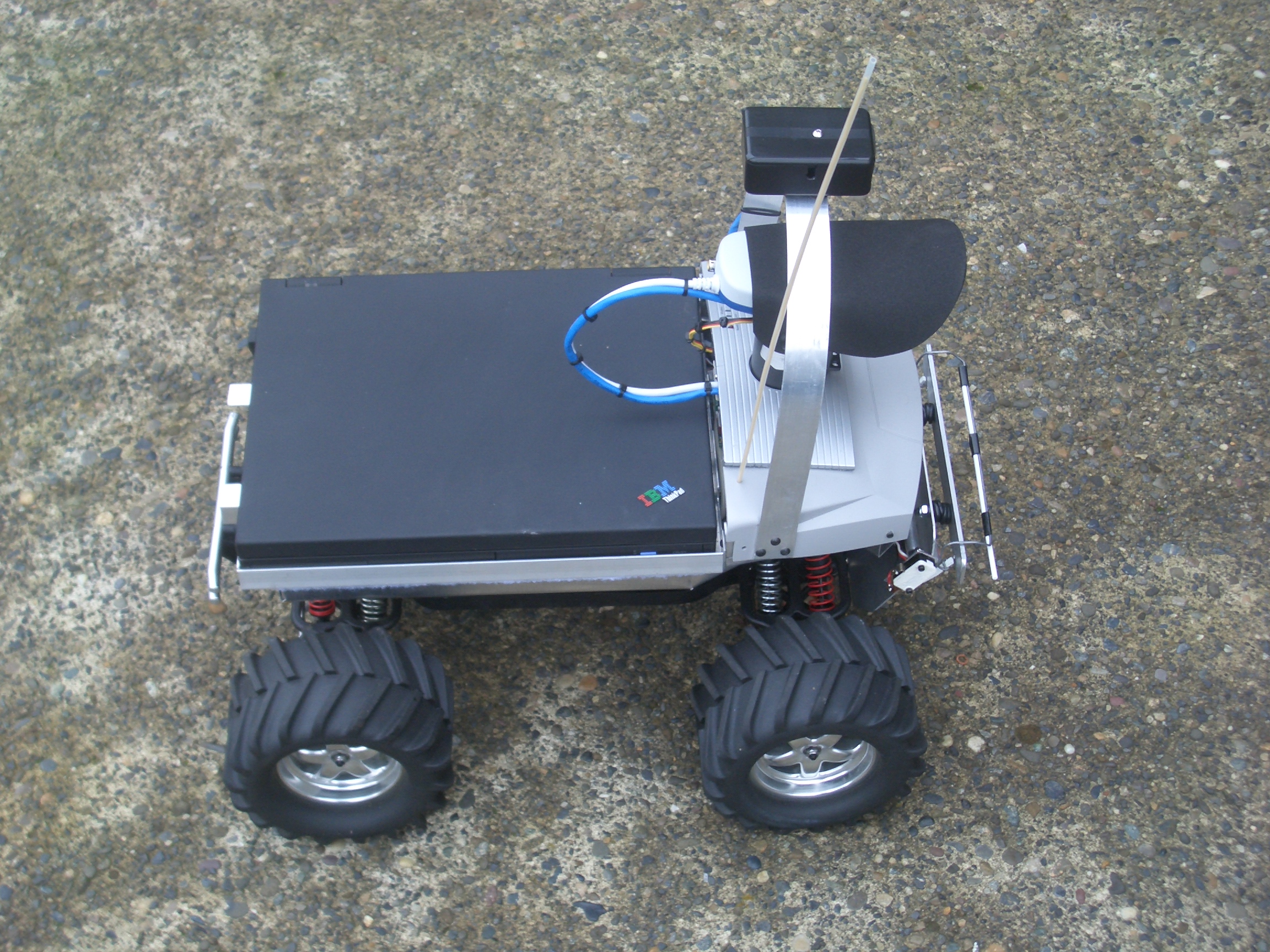
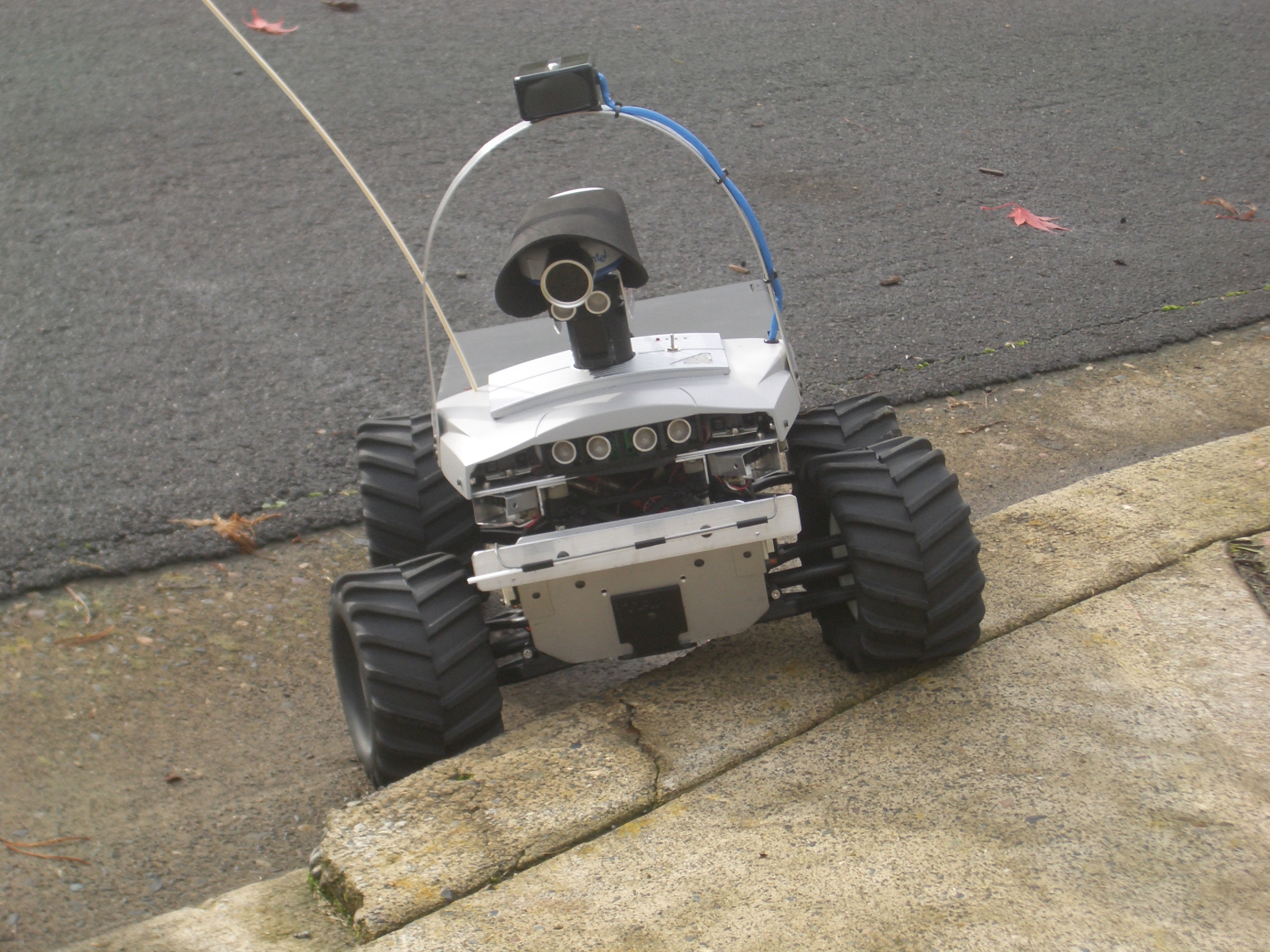
“Seeker” was designed to compete in Robo Magellan contests, or “DARPA Mini-challenge” at the Seattle Robotics Society (SRS) Robothon. He won first place in 2005 (the only year I competed). Seeker uses the same base software as my other robots, including the ability to do remote control and diagnostics over 802.11, but was my first robot to add path planning and map display capabilities ( which are extended even more in Loki).
Hey, I hope you're doing well. I wanted to let you know about our new BANGE backpacks and sling bags…


























11 Responses to Seeker