This website shows some of the robots built by Dave Shinsel over the past 15+ years. It contains hardware and software design info in the hope that this information will help and inspire others who want to build robots. Latest ROS based software for Sheldon is at www.github.com/shinselrobots.
New Robot: EB-6
 EB-6 (Explorer Bot 6) is my newest robot (a work in progress). My goal was to build a chat robot with A.I. that could talk with children. By making EB-6 smaller than my other robots, I hope to make her more approachable for children. (click on image for video)
EB-6 (Explorer Bot 6) is my newest robot (a work in progress). My goal was to build a chat robot with A.I. that could talk with children. By making EB-6 smaller than my other robots, I hope to make her more approachable for children. (click on image for video)
Sheldon featured in Microsoft Surface commercial
In this commercial, my newest project, “Sheldon“, is shown under various stages of construction. At the time this was filmed, Sheldon had aluminum skin for his body. I have since replaced the aluminum with 3D printed skins.

Sheldon featured in Microsoft Surface commercial
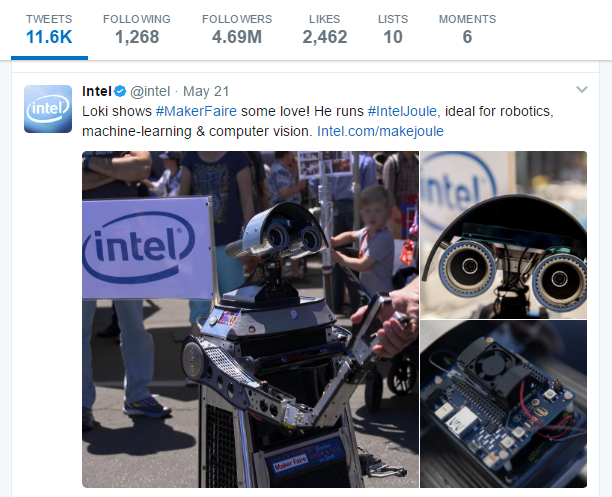
Loki at Maker Faire featured on Intel Twitter feed
…with over 4 million followers!

Winners of SyFy Channel’s Robot Combat League!
 Dave and his daughter won the $100,000 championship in the SyFy Series, “Robot Combat League”! Their robot “Crash” was 7’9″ tall and weighs 828 lbs. For more info, read the magazine article below, and/or see www.facebook.com/ShinselRobots
Dave and his daughter won the $100,000 championship in the SyFy Series, “Robot Combat League”! Their robot “Crash” was 7’9″ tall and weighs 828 lbs. For more info, read the magazine article below, and/or see www.facebook.com/ShinselRobots 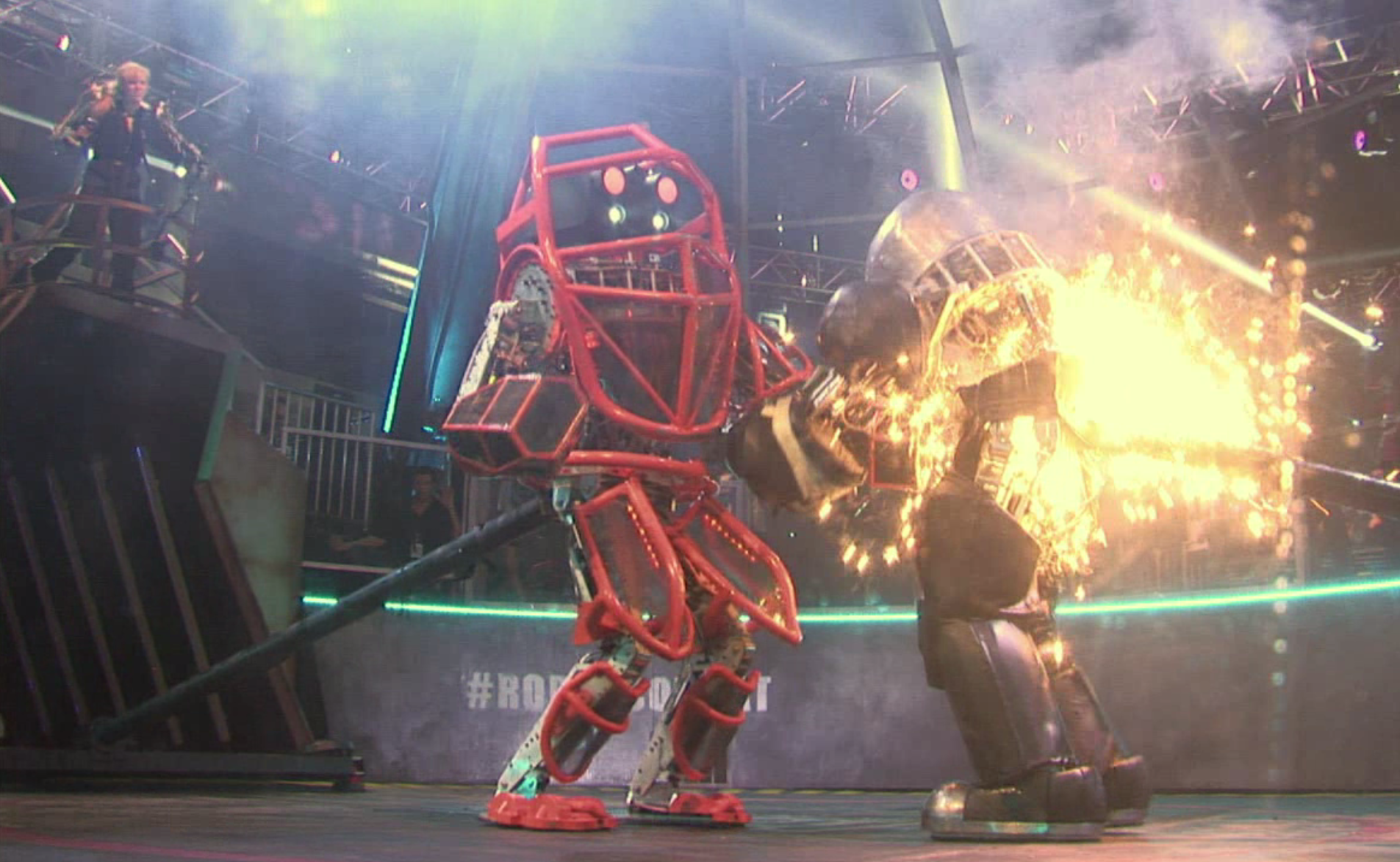
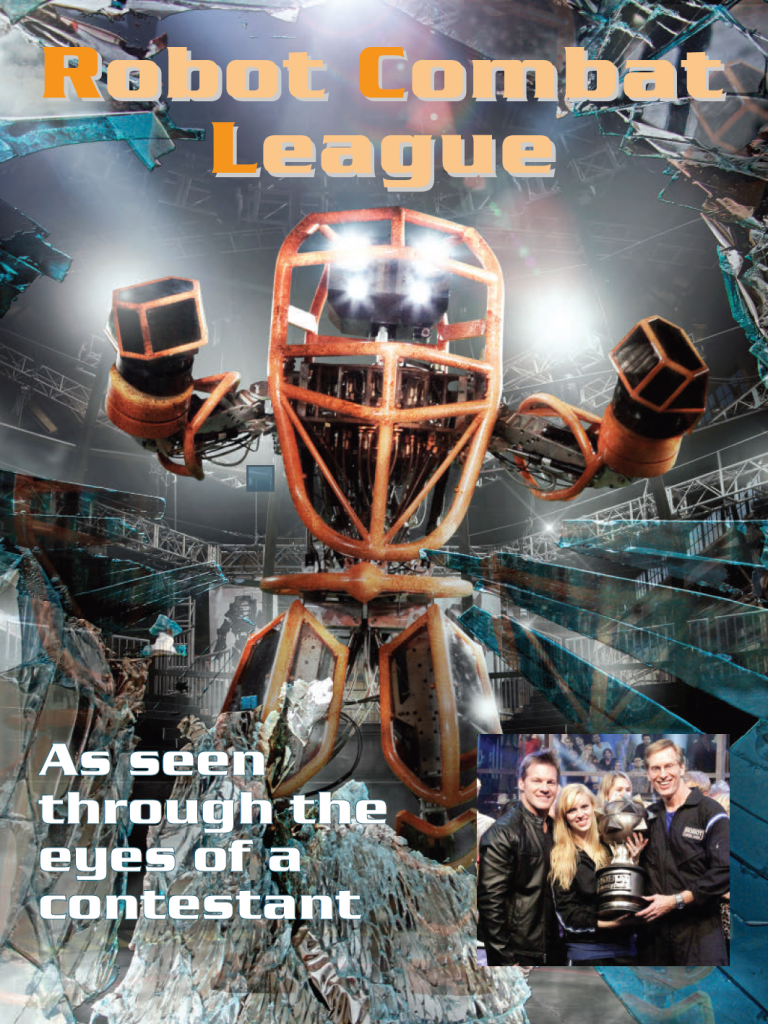
Read the Servo Magazine article
Robot Combat League –
Through the eyes of a contestant
“…The hydraulic fluid spraying puts the fire out as the referees blow the horn to tell us to separate…”

Dave and Amber with Star Wars creator George Lucas!
Videos
Also, search for “Loki Robot” on YouTube
- Loki Watches Star Wars – A funny video I made of Loki watching is favorite move, and getting scared. I hope you enjoy it. 🙂
- Loki at Intel Developer’s Forum:
- Loki More Behaviors – This shows Loki doing some interaction, and showing off some of his newer behaviors.
- Loki Cleans Up – Video of Loki looking for objects on the floor and picking them up, using the Kinect sensor for 3D object detection.
- Loki Robot 1 – First video of Loki, when he just had one arm. Testing out his conversational AI.
- Loki Robot 2 – Exploring the House. This shows Loki’s navigational capabilities using his built-in map and A* navigation.
- Loki Robot 3 – New Arm and Object Recognition. Using OpenCV SURF for object detection, and showing off some Karate moves.
- Dancing Robot; Loki’s little brother– This is a RoboNova robot I built, and programmed rock out with “Domo Arigato, Mr. Roboto”

In the Design area, I have photos of the robots during construction, as well as schematics, software design overview, and the source code for Loki, Turtle, and Seeker. I hope you find this information helpful in your own designs.
49 Responses to News and Updates