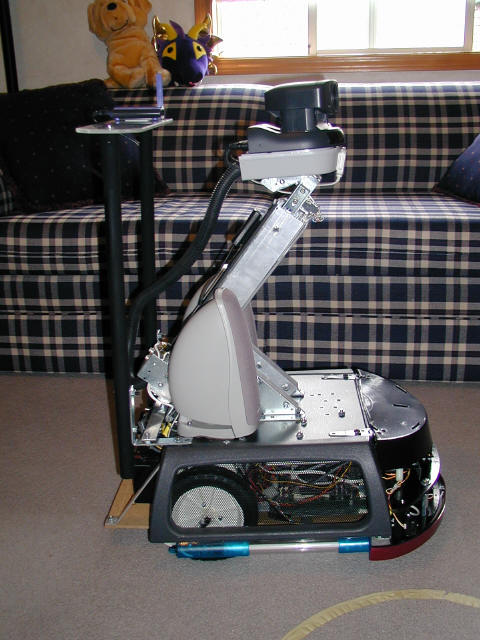
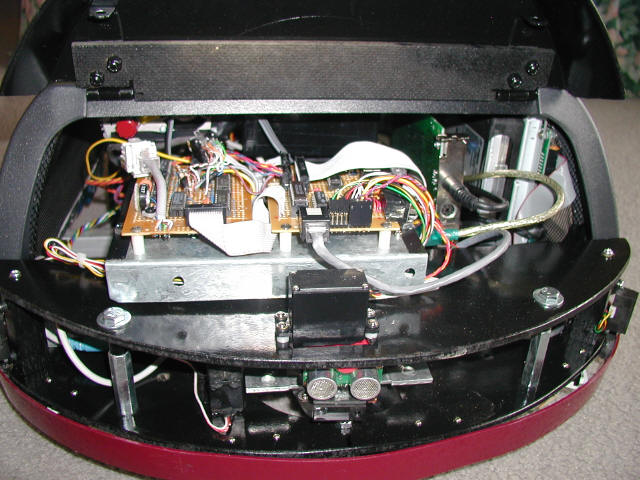
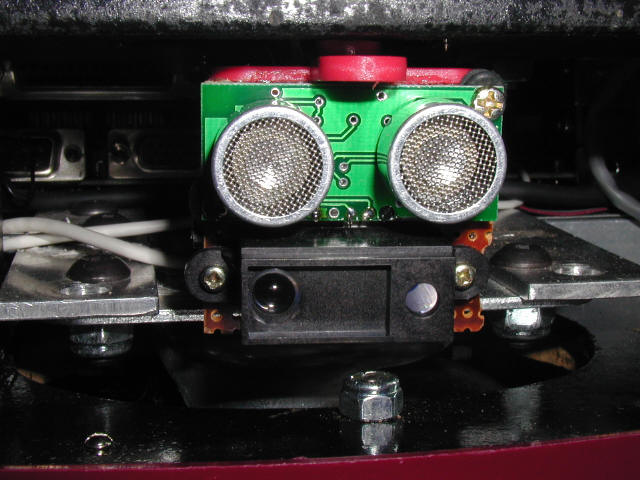
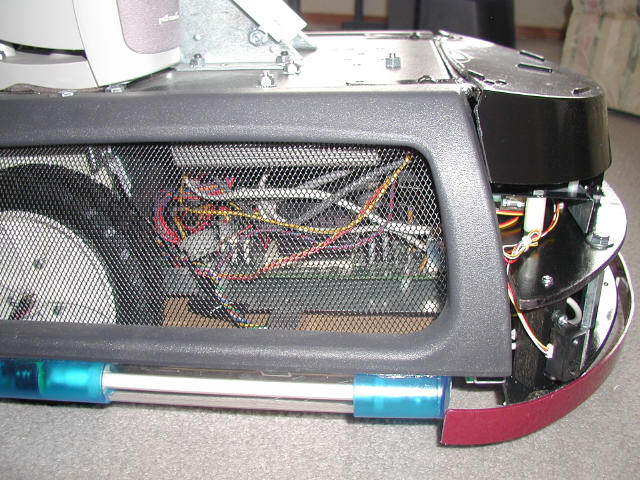
“Mr. Roboto” (named by by daughter, from the Styx song), was the first robot I built. He was a 40 lb remote presence robot that was operated via a remote client over WiFi. Mr. Robot taught me that you should never make your first robot powerful enough to damage walls. I started my first version of the current robot control software, built all the interface circuitry (including a custom H-Bridge from scratch), and learned a lot about motor control and sensors building this robot. He had a telescoping neck (for a Sony Pan/Tilt/Zoom camera) that I so over-engineered, I could sit on it. After building Mr. Roboto, I built several smaller robots, and as my skills grew I built larger and larger, eventually getting to my current robot, Loki.
Hey, I hope you're doing well. I wanted to let you know about our new BANGE backpacks and sling bags…

























One Response to MrRoboto