Hey, I hope you're doing well. I wanted to let you know about our new BANGE backpacks and sling bags…
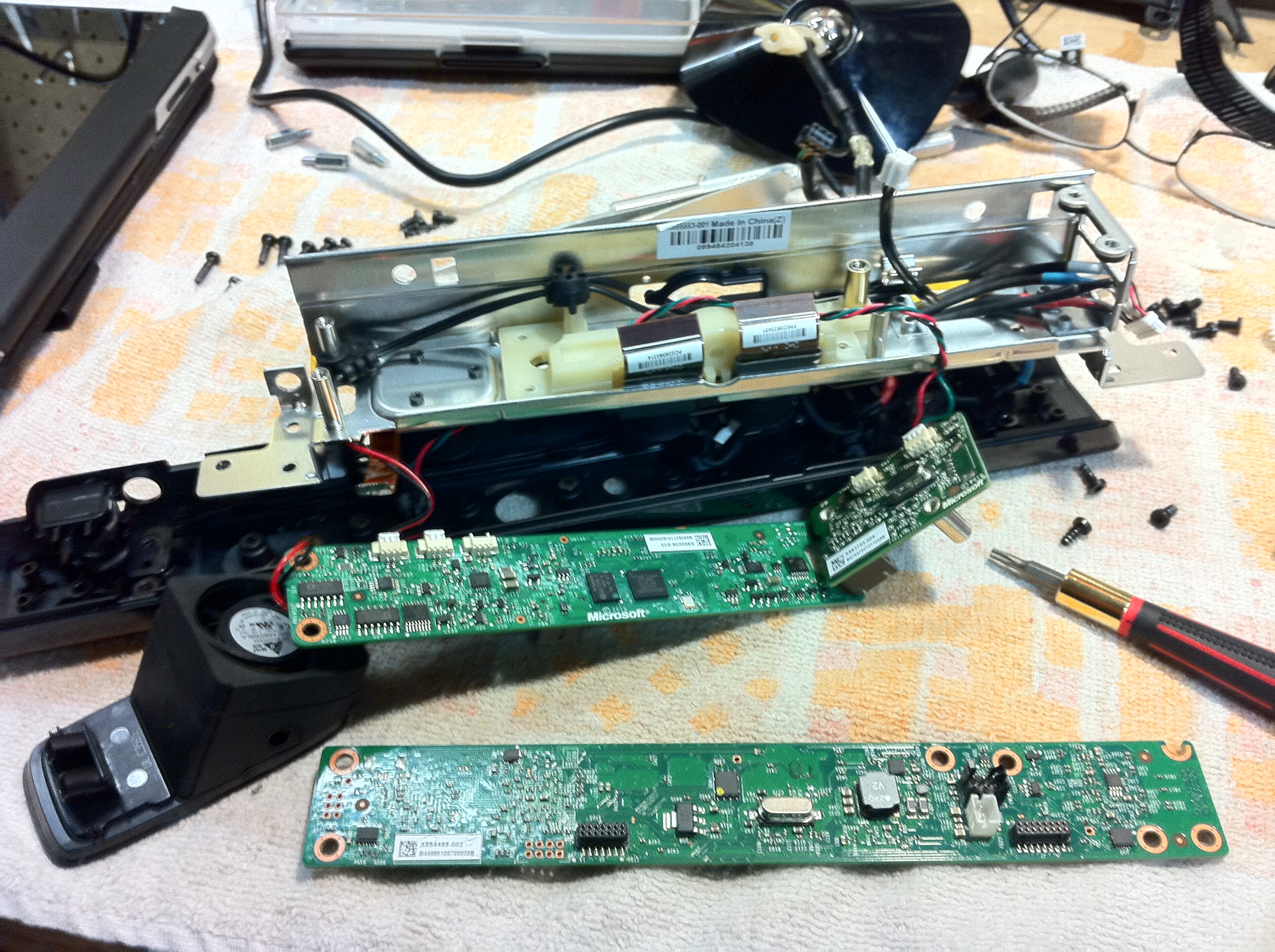
i see it says 14 Dynamixel Servos 64 and 28. How many of each?
i see it says 14 Dynamixel Servos 64 and 28. How many of each?
Hi Edward, I've just posted all the software on GitHub. Take a look at "robot_voice"!
Hi Trevor, Yay! I've posted the STL files on the "EB-6" page. Just scroll down to the Design section and…
Hi Dave I have been following you for very long time and love liking....joyous have the stl files for eb-6…









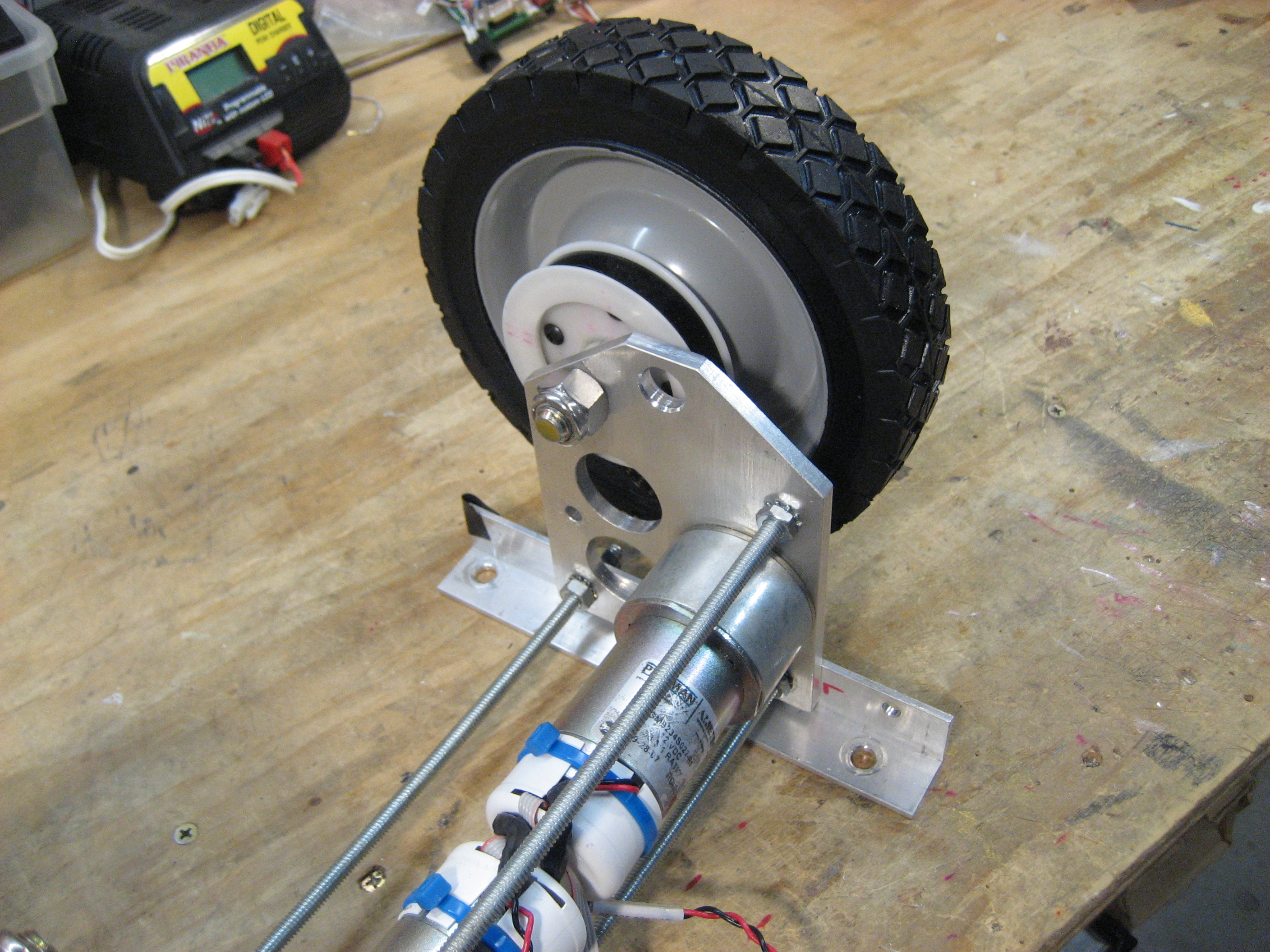
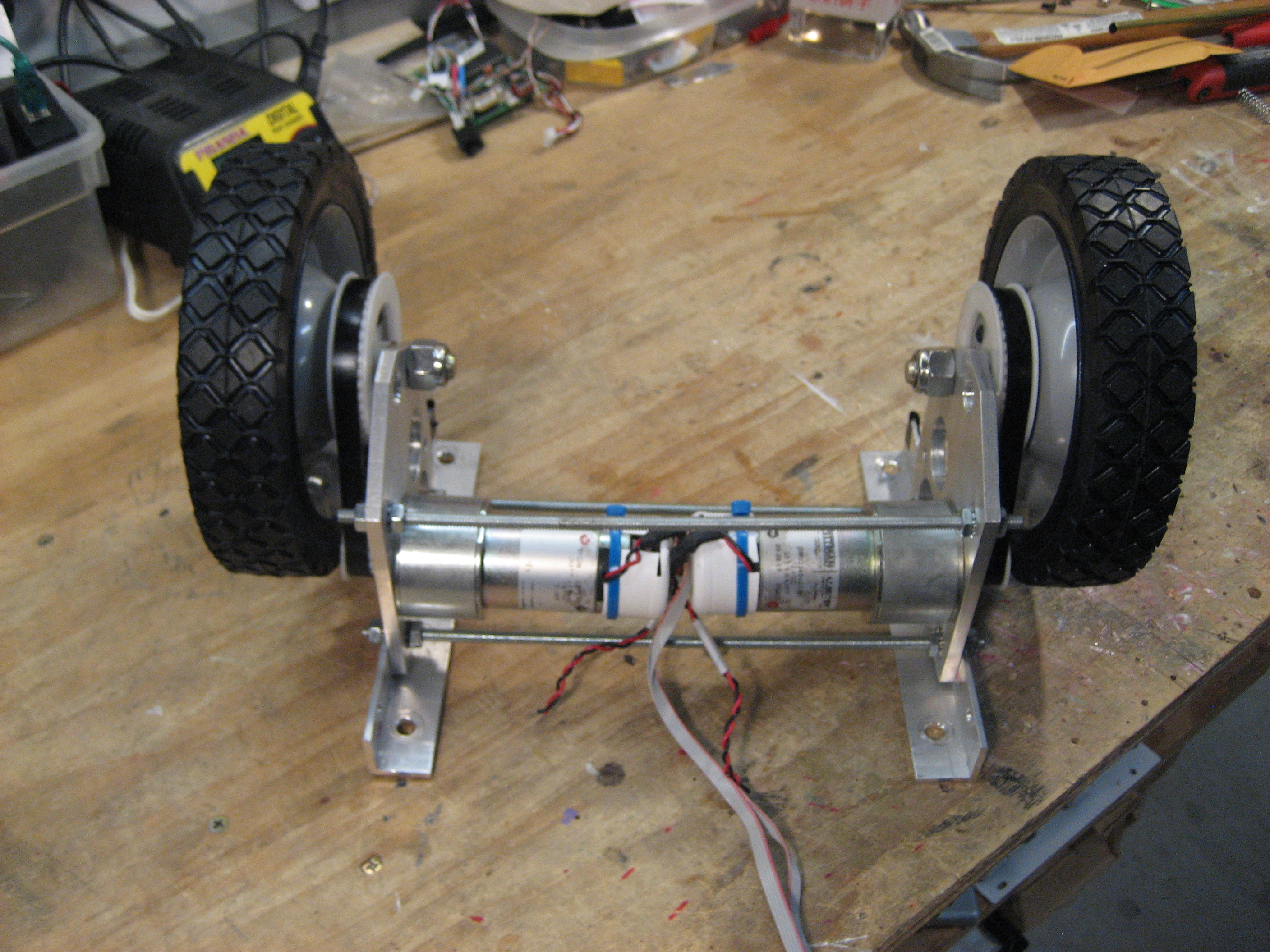

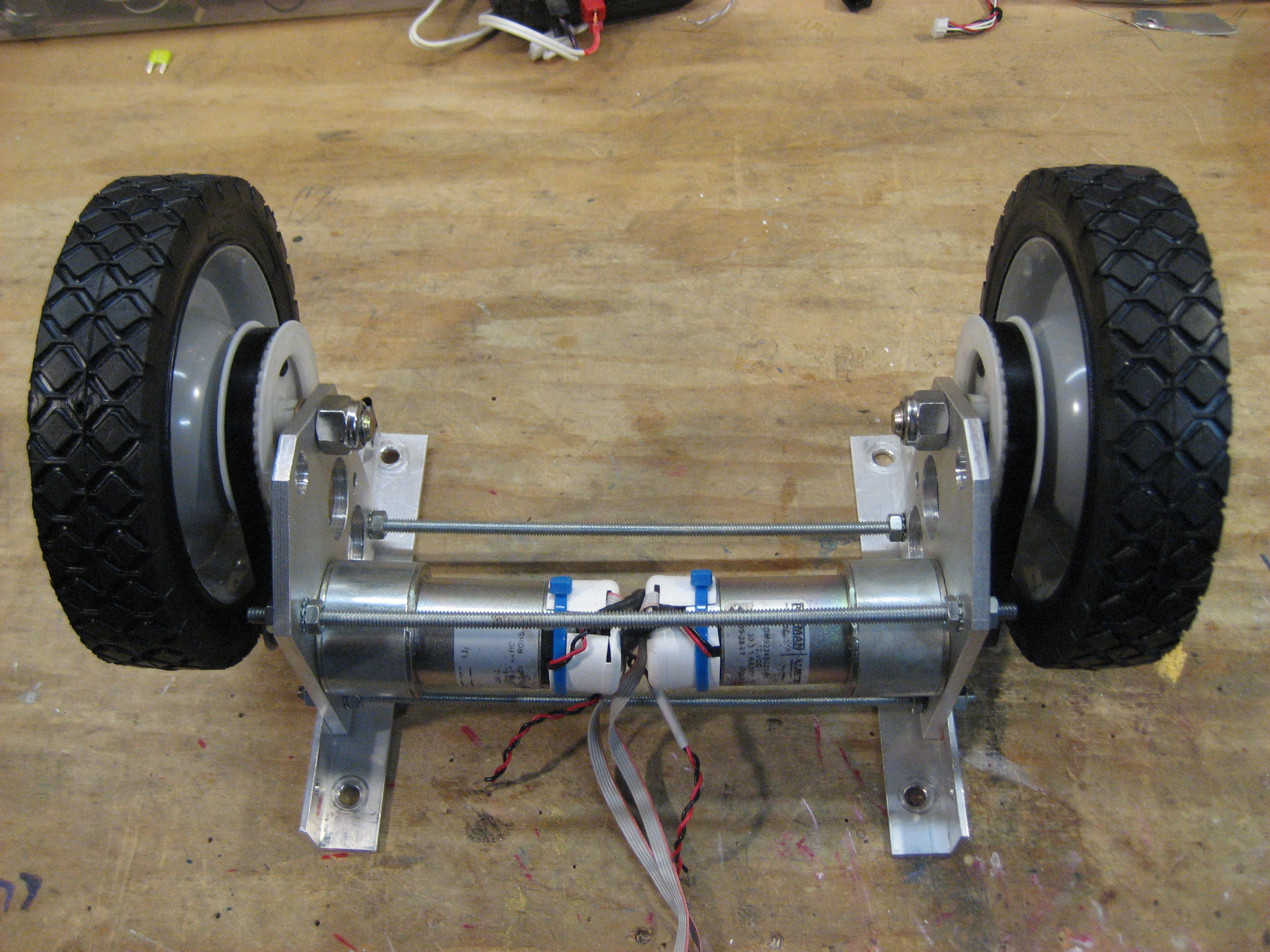
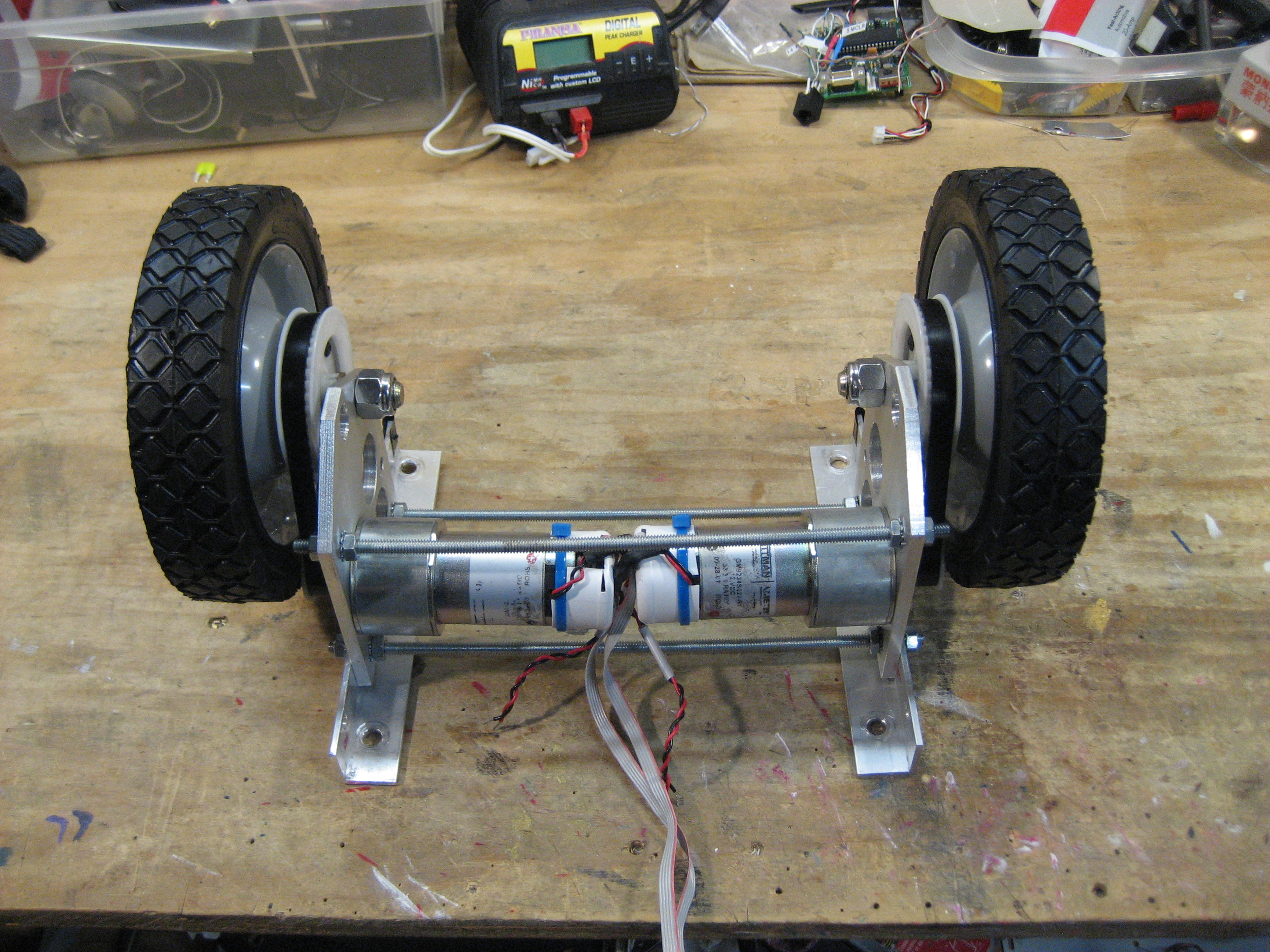


3 Responses to Loki Current Mechanical