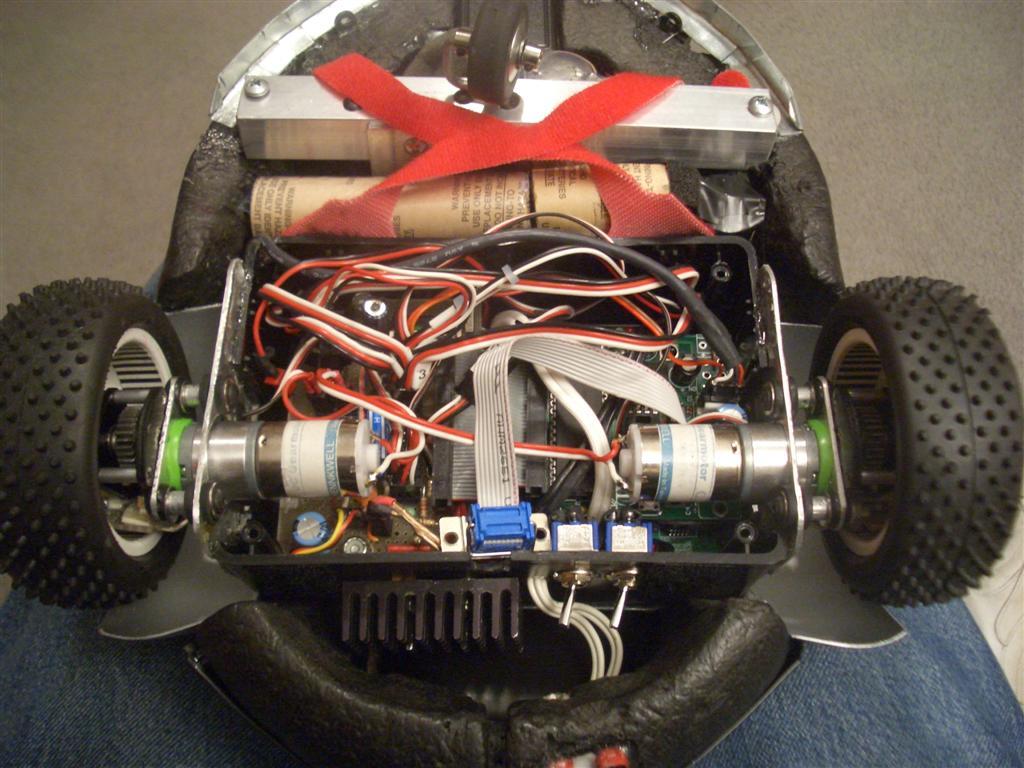
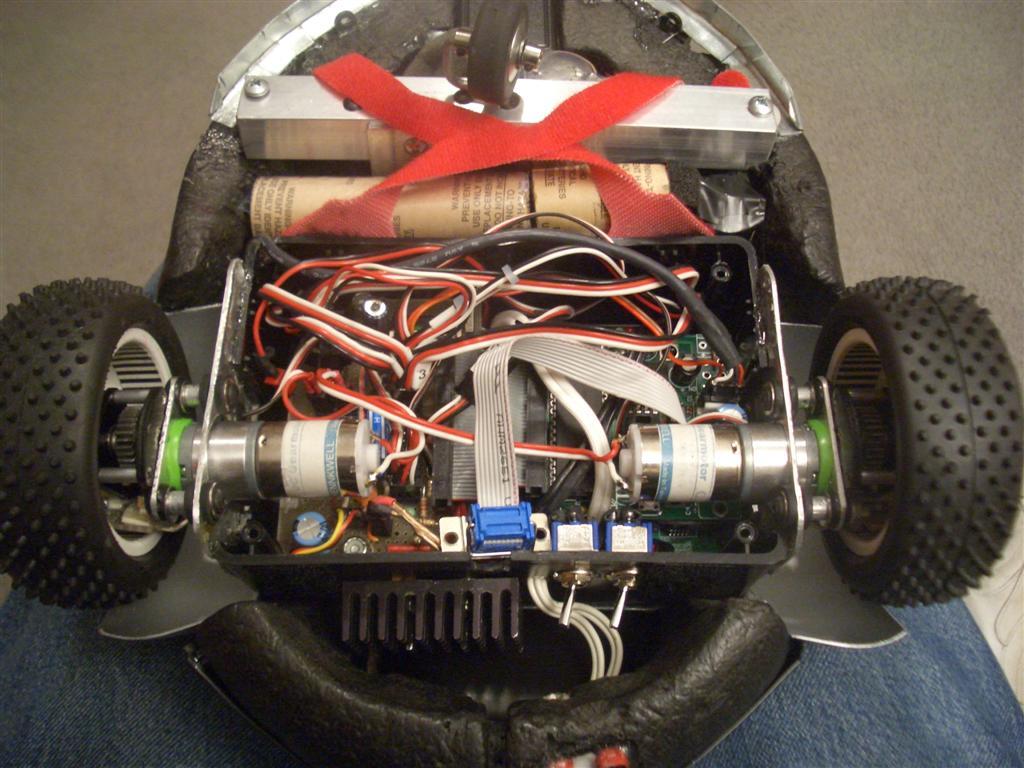
HelmetBot is a telepresence robot. It was setup so I could remotely control him while traveling, and see what he sees.
I built HelmetBot out of a bicycle helmet. He has 6 IR sensors in the front for object avoidance, a Logitech WebCam, and an iPaq for interface. Of course, if I were to build him today, I would use an Arduino and/or Android device.
See the HemetBot Construction page for more pictures.





















2 Responses to HelmetBot